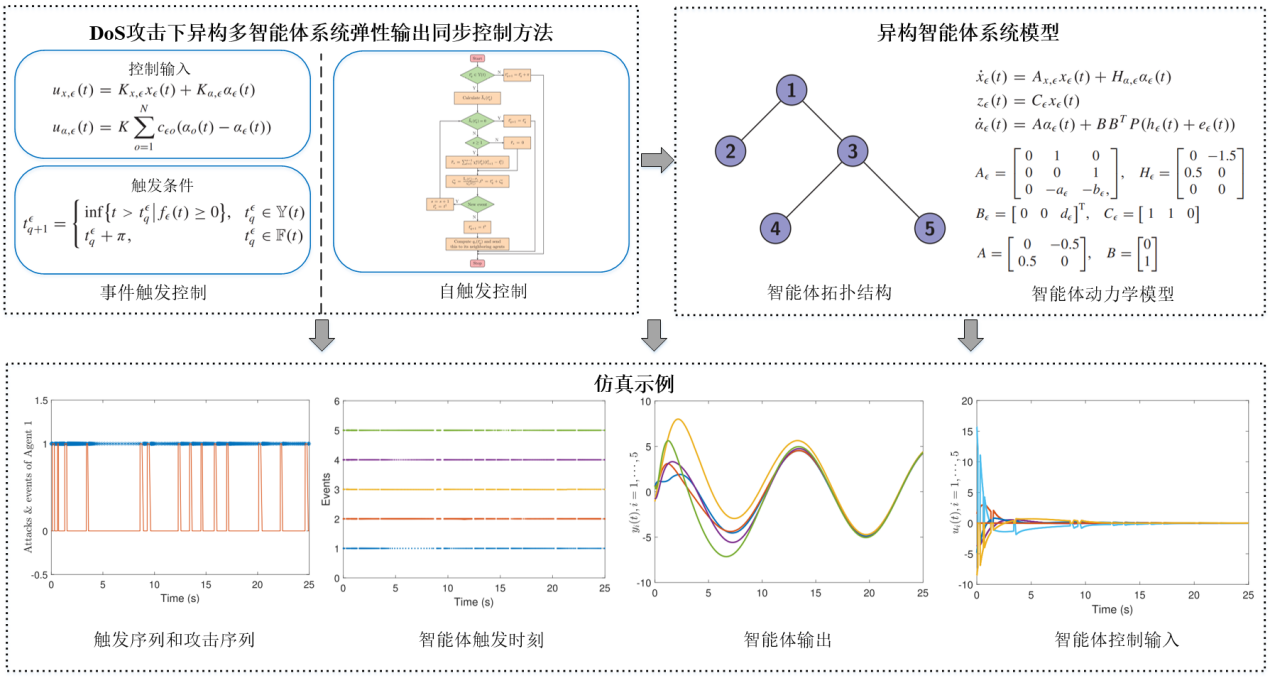
针对DoS攻击破坏智能体拓扑结构,屏蔽智能体通讯的问题,研究团队分别设计出安全一致性控制器和弹性输出同步控制器。多智能体系统在工业领域、军事领域具有广泛的应用,其控制的稳定性和安全性要求十分严格,稍有不慎便会造成不可估量的经济损失,甚至威胁群众的生命安全。另一方面,由于多智能体系统通讯媒介的开放性,使其容易遭受针对网络结构的恶意攻击,DoS攻击是其中最有效且普遍的一种。通过对有攻击和无攻击时间区间进行划分,构建了DoS攻击模型,结合多智能体模型,完成了控制模型的建立。获取控制模型后,研究团队分别针对同构智能体和异构智能体设计了安全一致性控制器和输出同步控制器。并且通过李雅普诺夫函数法,证明了在DoS攻击下,所设计的控制器能够实现智能体的渐近一致和输出同步。该方法有效的抵御了DoS攻击,确保了系统的安全运行。最后,研究团队通过仿真实验验证了控制方法的有效性及可行性,确保该方法能够实际应用。
代表性成果:
[1] Du Shengli, Xu Wenying, Qiao Junfei, Daniel Ho. Resilient Output Synchronization of Heterogeneous Multiagent Systems With DoS Attacks Under Distributed Event-/Self-Triggered Control, IEEE Transactions on Neural Networks and Learning Systems, 2021.
[2] Du Shengli, Yan Qiushuo, Dong Lijing, Qiao Junfei, Secure consensus of multiagent systems with input saturation and distributed multiple DoS attacks, IEEE Transactions on Circuits and Systems II-Express Briefs, 2022, 69(4): 2246-2250.
